Проверка оптимальности планов
Известно [2], что для оптимального плана необходимо и достаточно, чтобы он был потенциальным.
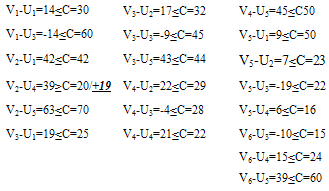
Для оценки потенциальности плана составляется система из m+n чисел u1, u2, …um, v1, v2, …vn, удовлетворяющая условиям:
- для всех клеток таблицы
vj- ui≤ Cij, (i=1, 2, …m; j=1, 2, …n);(13)
- для клеток, где Xij> 0
vj-ui=Cij.(14)
Если условия (13) и (14) удовлетворяются для составленного плана, то он потенциален и, соответственно, является оптимальным. В противном случае, если они не удовлетворяются хотя бы для одной из клеток таблицы, то план не потенциален и требует улучшения.
Определение величин ui и vj производится по условию (14), при этом оказывается, что число неизвестных на единицу больше, чем число уравнений. Поскольку нас интересуют не абсолютные величины потенциалов, а их разность, одному из неизвестных придается какое-либо значение, чаще всего ui = 0.
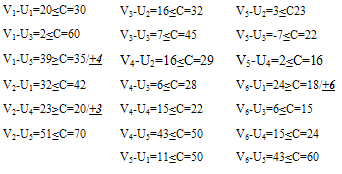
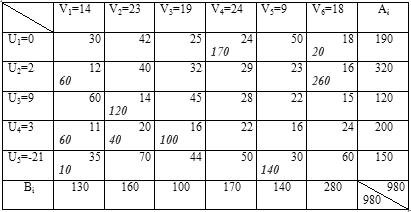
Оценим потенциальность составленных планов.
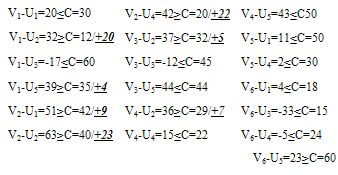
Условие оптимальности плана не выполняется, требуется улучшение.
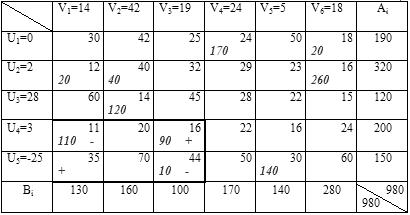
Таблица4
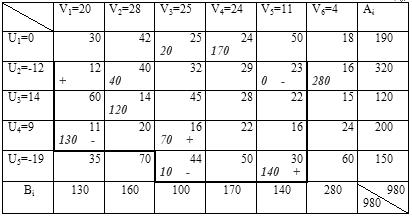
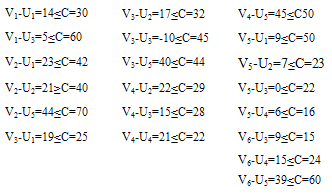
Оценим потенциальность составленных планов.
Условие оптимальности плана не выполняется, требуется улучшение
Таблица5
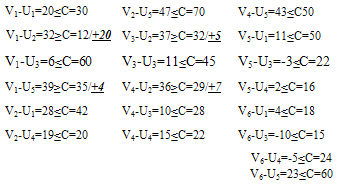
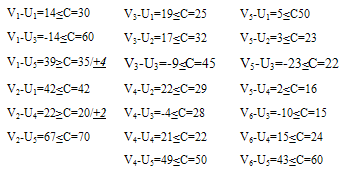
Оценим потенциальность составленных планов.
Условие оптимальности плана не выполняется, требуется улучшение
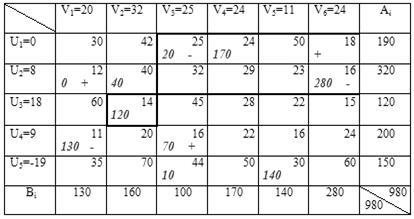
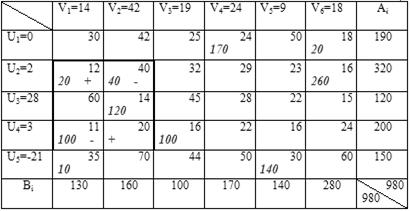
Таблица6
Оценим потенциальность составленных планов.
Условие оптимальности плана не выполняется, требуется улучшение
Таблица7
Оценим потенциальность составленных планов.
Условие оптимальности плана не выполняется, требуется улучшение
Таблица8
Оценим потенциальность составленных планов.
Условие оптимальности плана выполняется, улучшение не требуется.
Суммарные транспортные издержки.
W=4080+360+720+4160+280+660+800+1600+350+1200=12770
Окончательный вариант плана, по которому суммарные транспортные издержки W = 12770, показан в таблице 8.
Актуальное на сайте:
Системы контроля последовательного действия для
контроля геометрической формы и размеров разнообразных объектов
Частным типом систем контроля последовательного действия являются сканирующие системы для контроля геометрической формы и размеров разнообразных объектов. Контролируемыми величинами в этом случае являются геометрические размеры объекта ко ...
Расчет годовой производственной программы
Расчет годовой производственной программы по ТО и КР.
После расчета коэффициента технической готовности парка, расчета годового пробега автомобилей, рассчитывается количество капитальных ремонтов за год и технических обслуживаний по вид ...
Исследование функционирования автомобиля в особо малой системе
Маятниковый маршрут с обратным груженым пробегом (γ1 = γ2)
где П1, П2 – пункты погрузки, соответственно первый и второй;
Р1, Р2 – пункты разгрузки, соответственно первый и второй;
Рис. 3 Схема маятникового маршрута, с обрат ...
 Автомобильные дизельные топлива
Автомобильные дизельные топлива