Выбор и обоснование аналогов или базы сравнения. Расчет интегрального показателя качества
Исходя из анализа рынка известно, что на данный момент на рынке присутствуют системы способные производить измерение температуры буксовых узлов подвижного состава. К таким системам относятся – Диск-Б, АСДК-Б, ПОНАБ. Рассмотрим более подробно некоторые из них.
Анализ системы ДИСК-Б
Согласно принятым предписаниям на железнодорожном транспорте, напольная стационарная система контроля устанавливается непосредственно на пути движения транспорта и удалена от ближайших станций на 10 км.
Контроль состояния букс движущихся вагонов осуществляется путем неконтактного телеметрического измерения их температуры посредством инфракрасных каналов с последующим сравнением текущих значений с эталонным и фиксацией состояния вагонов состава [2]. Система контроля снабжена также подсистемой обнаружения дефектов колес вагонов по кругу катания путем измерения значений амплитуд колесных ударов о рельсы и сравнения с допустимым, и подсистемой обнаружения волочащихся деталей посредством фотоэлектронных каналов. В состав напольной стационарной системы входят каналы и каналообразующие средства связи ее с диспетчерским пунктом железнодорожной станции.
Типовой алгоритм сбора и обработки информации от аналоговых датчиков состояния вагонов и передачи ее на центральный диспетчерский пункт (ЦДП) можно представить в виде структуры на рисунке 7.1.
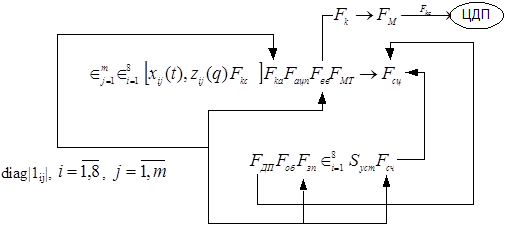
Рисунок 7.1 - Структура алгоритма типовой системы контроля.
Операторы FKCi (поканальная передача сигналов Xij(t), Zij(q), i=l ,8 -число датчиков, j=l, .,m - число вагонов), Fка (коммутация аналоговых сигналов), FАЦП (аналого-цифровое преобразование) и FВВ (операция ввода) производят последовательный циклический ввод аналоговой информации Xi(t), zi(q) от температурных и пьезоакселерометрических датчиков о состоянии соответственно букс и колес катания в вычислительный процессор стационарной системы контроля, после чего реализуются оператор FM масштабирования и представления информации контроля в технических единицах, соответствующих физическому смыслу контролируемых параметров. Затем текущая информация сравнивается (Fcц) с уставками и после кодируется (FK) и посредством модема передается на станционный диспетчерский пункт (Fcц, Fk, FM). Управление системой контроля производится программой-диспетчером (Fд). Блок-схема подсистемы ДИСК-Б показана на рисунке 7.2.
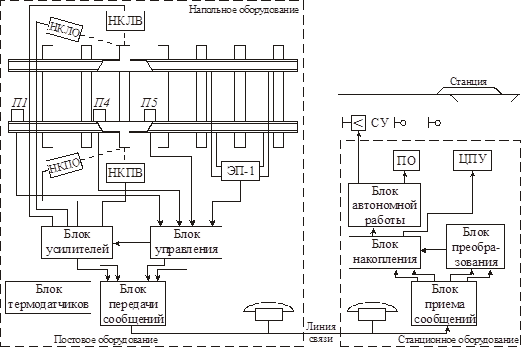
Рисунок 7.2 - Блок-схема подсистемы ДИСК-Б.
Помимо контроля указанными средствами общее состояние движущего состава оцениваются при его дуговых поворотах путем визуальных осмотров, осуществляемых с локомотива машинистом и его помощником.
На стоянках станционный технический персонал производит выборочно визуальный спектрально–акустический контроль элементов движения вагонов.
Анализ базовой подсистемы АСДК-Б
Автоматизированная система диспетчерского контроля и управления представляет собой распределенную компьютерную систему сбора, обработки информации, оперативного управления и речевой связи [3]. АСДК работает под управлением встроенной микропроцессорной системы и ПЭВМ пункта управления (диспетчерской).
Базовая подсистема АСДК-Б автоматически распознает перегретые буксовые узлы в результате оценки температуры шейки оси колеса по данным дистанционного контроля температуры корпуса буксы и ступичной части при помощи камер напольных, передает на станцию и регистрирует в аппаратуре станционного пульта контроля и сигнализации информацию о наличии таких буксовых узлов в поезде с указанием порядкового номера и стороны подвижной единицы. Кроме того, аппаратура АСДК-Б обеспечивает оповещение работников соответствующих служб железнодорожной станции о результатах контроля.
Актуальное на сайте:
Коробка передач трактора ДТ-75 МВ
Четырехходовая, семиступенчатая коробка передач позволяет получить семь передач вперед и одну передачу заднего хода.
Коробка передач имеет ведущий, промежуточный, ведомый валы и вал заднего хода. Через расположенный сверху пустотелый вед ...
Сборы за дополнительные операции, связанные с перевозкой грузов
Сбор – не включенная в тариф ставка оплаты дополнительной операции работы.
Тарифным руководством №3 предусмотрены следующие сборы:
за объявленную ценность;
за сопровождение и охрану;
за погрузо-разгрузочные работы;
за взвешивание гру ...
Технологический расчет проектируемого предприятия
Исходные данные принимаются в соответствии с заданием на курсовое проектирование.
Исходные данные:
Наименование проектируемого объекта – пост диагностирования.
Модель автомобиля – ЗИЛ-131Н.
Количество автомобилей – 359.
Условия экспл ...
 Автомобильные дизельные топлива
Автомобильные дизельные топлива